FA・ロボット業界の片隅から
id:fasumi
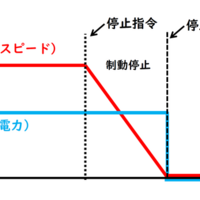
ロボットの「停止」についてまとめ
本記事は、元々「協働ロボットの『安全適合監視停止』について①~前置き:ロボットの『停止』について~」というタイトルで公開していましたが、 ISO10218シリーズ:2025の発効時に「安全適合監視停止」が協働アプリケーションの要件から外れたため、2025年3月に内容及びタイトルを修正しました。ロボットの「停止」につい…