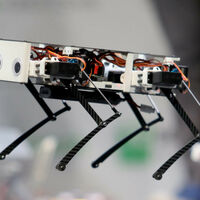
旋回やジャンプも自由自在なオープンソースの四足歩行ロボット「Stanford Pupper」を実際に組み立てられる詳細な説明書が公開
スタンフォード大学の研究チームが小型四足歩行ロボット「Stanford Pupper」の製作に必要なパーツやソフトウェアなどを公開して、自作方法を詳しく解説しています。
 gigazine.net
gigazine.net