
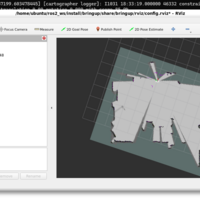
【ROS2】Cartographerを使ってLiDARの出力だけからSLAMする話
これの続きです。 kogakudanshi.hatenablog.jp こちらの記事を参考にGazeboから実際のLiDARに置き換えたものになります。 qiita.com パッケージのインストール $ sudo apt install ros-humble-cartographer $ sudo apt install ros-humble-cartographer-rviz $ sudo apt install ros-humble-laser-filters #/scanトピック…
