aptpod Tech Blog
id:aptpod_tech-writer
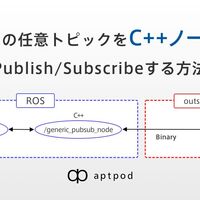
ROSの任意トピックをC++ノードでPublish/Subscribeする方法
はじめに 製品開発グループの野本です。 組込ソフトウェアエンジニアとしてデータ収集用端末のソフトウェア開発を担当しています。 今回はROSの取り組みの一環として、C++で任意のトピックをPublish/Subscribeする方法についてご紹介します。 はじめに 背景 調査結果 性能測定 topic_tools::ShapeShifterとは? (参考) ros…