アプリとサービスのすすめ
id:trafalbad
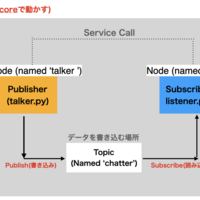
ROSの基本プログラムのTopic通信(非同期通信)を動かす
今回はROSの基本のPublisherとSubscriberを使ったROSの基本プログラムtopic通信(非同期通信)をうごかしたので、その備忘録。仕組みとしてはこんな感じ・Topic :データを書き込む場所(非同期通信のメイン) ・Service :publisher側でsubscriberの結果を受け取る機能。publisherと一緒に呼び出す ・Publisher:データを書…