AbudoriLab.
id:mikefukurou
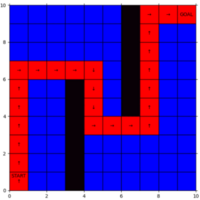
経路計画の基礎 ~幅優先探索と深さ優先探索~
AbudoriLab.です。今回は、SLAMと並んでロボットの自律移動のために重要な技術である経路計画についての記事になります。 本記事では、経路計画の最も基本的な手法である幅優先探索と深さ優先探索のアルゴリズムの概略を解説し、実際にプログラムを動かして両者の比較を行います。 今後も経路計画の記事をシリーズで連載し…